Home to Human-Robot Interaction
This website uses cookies that store information about your usage of the page. By continuing to use this page you confirm you are happy with that. Review and change how cookies are used.
Confirm
Sorry, the requested page could not be found.
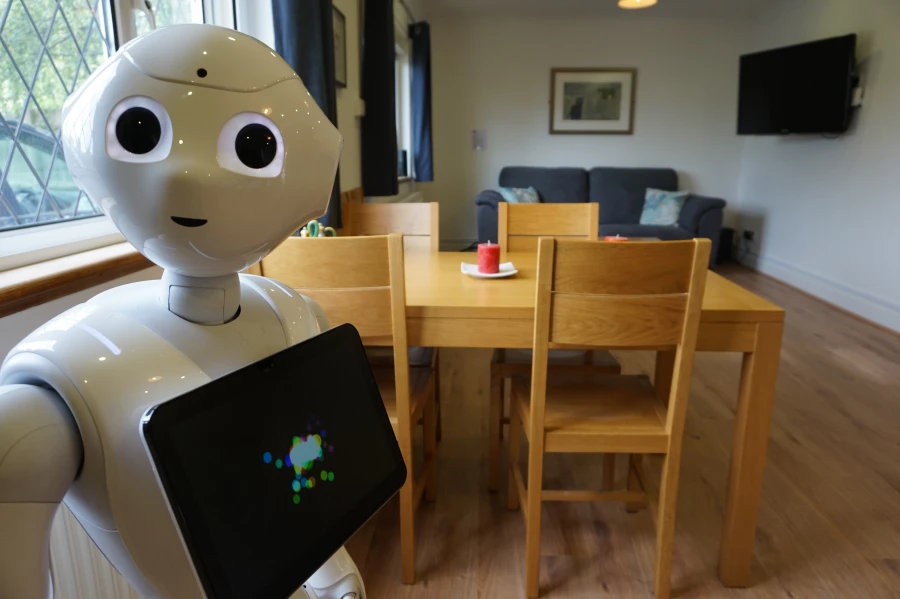
Meet the resident robots that can participate in research studies inside the Robot House, including the Care-O-bot 4.
Robot House has opened its doors to academia and industry in the UK and internationally. Find out how to access the facility.