This website uses cookies that store information about your usage of the page. By continuing to use this page you confirm you are happy with that.
Review and change how cookies are used.
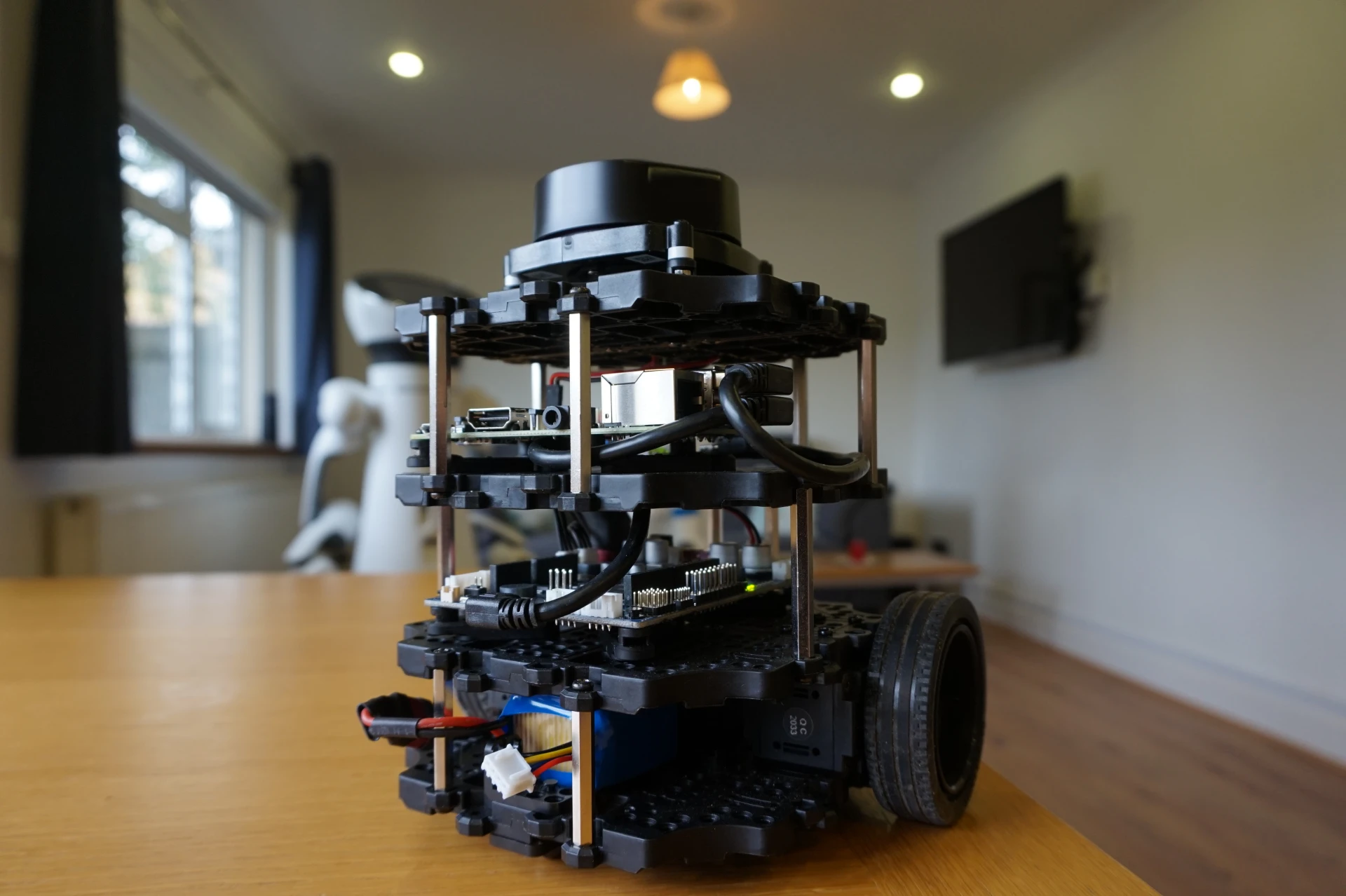
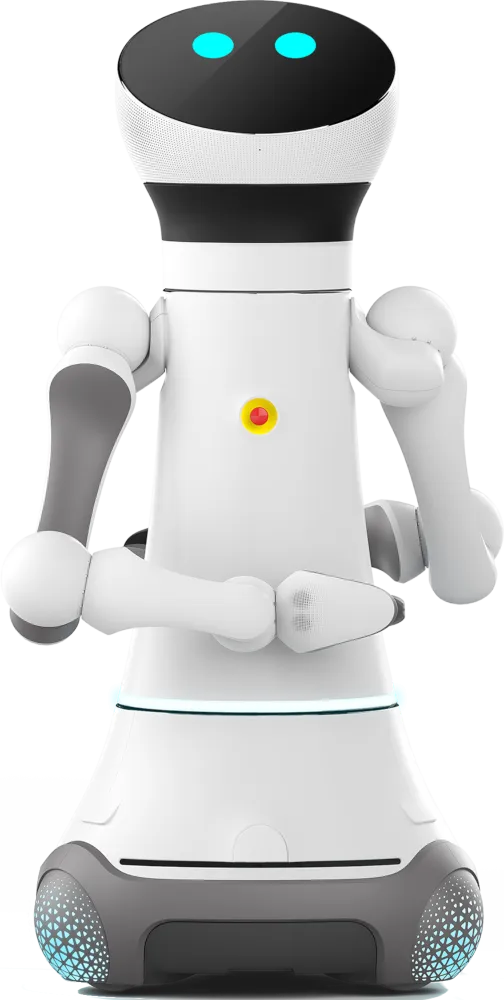
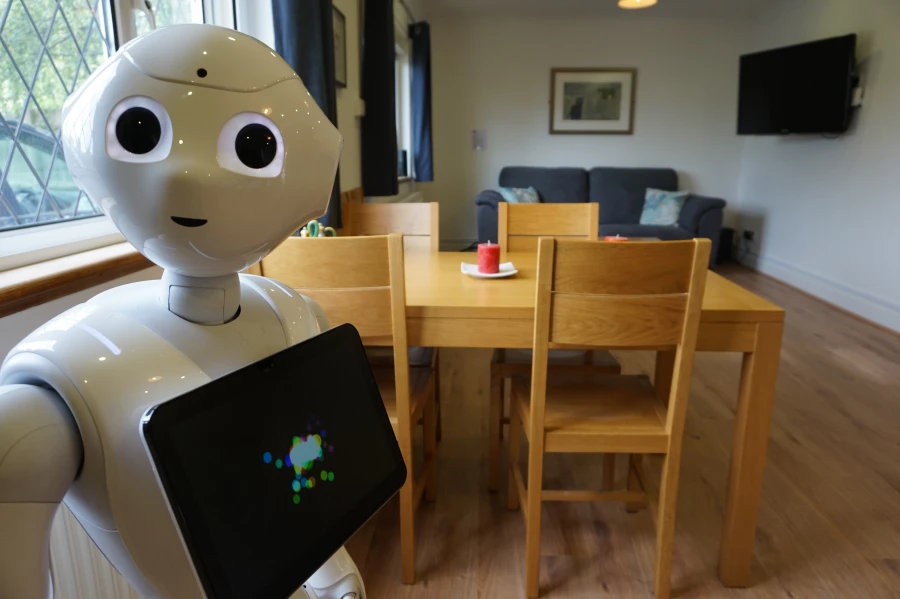
Our robots provide people with social, physical and cognitive support, mostly within a care context. Some are programmed to help people fetch objects; others prompt people to look after themselves by reminding them to, for example, drink water regularly, eat three meals a day and take their medicine.