Repairing the tray
If Care-O-bot 3’s tray position becomes misaligned with its virtual representation, it cannot be moved safely anymore. A deviation can occur, for example, if the arm holding the tray gets moved while the robot is switched off. To resolve the problem, it might be necessary to reconfigure the tray’s reference position using the MTS software.
Using the manufacturer’s software
To recalibrate the tray using the manufacturer’s software, you need the following items:
Windows (10) Computer/Laptop with internet connection (for downloads)
An esd CAN-USB/2 device (confirmed working but CAN-USB Mini might also work):

Matching USB cable (probably type A <-> type B)
Download and install the following software:
CAN-USB/2 drivers from esd (free account required)
CANopen tools from esd (free account required)
MTS software from Schunk
Follow these steps to recalibrate the tray:
Disconnect the tray’s serial cable labelled
trayfrom the grey USB adapter that is connected to the robot (see below)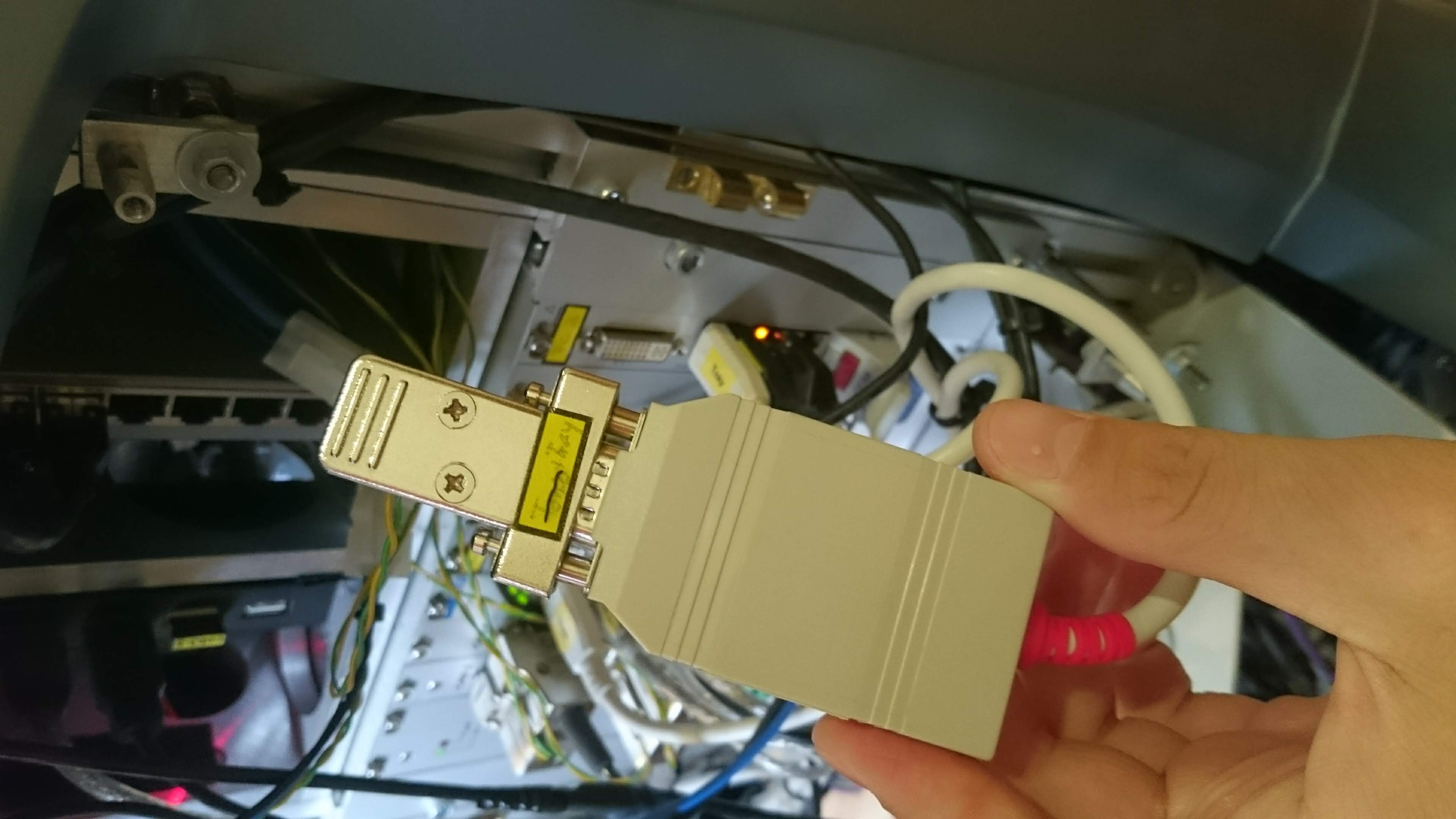
Connect your computer to the serial cable using the CAN-USB/2 device
From the CANopen tools run COT_ResetToSMP and select the joint you want to move (see below)
Joint
7: power joint that lifts the tabletJoint
8: power joint that rotates the tabletJoint
10: shoulder joint

Run the MTS software and select
500,000BaudrateUse move relative pose to move to the new reference point
Press the reference button to set zero position (new reference point)
Close the MTS software
From the CANopen tools run SMP_ResetToCANopen and select the same joint again
Plug back the tray’s serial cable to peak USB box
Reboot the robot so the tray joints initialize to the new value
To see if you have calibrated everything correctly, start Care-O-bot 3 as usual and check if the tray position is correct in RViz after initialization in the dashboard.